88-230 אינפי 3 סמסטר א תשעג/קבוצה רגילה/פתרון מועד א
תוכן עניינים
שאלה 1
סעיף א
עבור נקודות  פשוט גוזרים את הפונקציה לפי
פשוט גוזרים את הפונקציה לפי 

עבור הנקודה  קל לראות ש
קל לראות ש

סעיף ב
כמו שראינו בקלות ש  קל לראות שגם
קל לראות שגם  ו
ו  .
.
ראשית נוודא ש  רציפה (לא חייבים, אבל בדר"כ שווה לבדוק. כי אם היא לא רציפה אז ברור שהיא לא דיפרנציאבילית).
רציפה (לא חייבים, אבל בדר"כ שווה לבדוק. כי אם היא לא רציפה אז ברור שהיא לא דיפרנציאבילית).
נשים לב ש

ולכן רציפה.
נבדוק דיפרנציאביליות
צריך לבדוק אם  המוגדרת לפי:
המוגדרת לפי:

מתכנסת ל  בנקודה
בנקודה  .
.
במקרה שלנו צריך לבדוק את:

היות ו

נותר לבדוק את
נשים לב ש

דרך אחרת (שימושית כאשר יש במכנה דברים בסגנון  ):
):
עוברים לקוארדינטות כדוריות

ואז צריך לחשב גבול

ולכן דיפרנציאבילית ב .
שאלה 2
הפונקציה מקיימת  .
.
נבחר  קבוע.
קבוע.
ניתן להגדיר פונקציה  לפי:
לפי:

(אם נסמן  אז למעשה
אז למעשה  )
)
נגזור את  לפי
לפי  .
.
מצד אחד זה (לפי כלל השרשרת)

מצד שני זה שווה ל

כלומר לכל מתקיים

כעת נציב

ונקבל את התוצאה הרצויה

שאלה 3

הנגזרות החלקיות של הפונקציות


קיימות עד איזה סדר שרוצים.
כמו כן, הנקודה  מקיימת את מערכת המשוואות.
מקיימת את מערכת המשוואות.
נבדוק את התנאי של משפט הפונקציה הסתומה
בנקודה נקבל את המטריצה

שהיא מטריצה הפיכה.
לכן לפי משפט הפונקציה הסתומה, אכן מוגדרות פונקציות של
 לפי
לפי 
לפי משפט הפונקציה הסתומה, קיימת סביבה של הנקודה
שבה מתקיים:
כלומר במקרה שלנו:
אם פותרים את המשוואות
רואים ש

כלומר:

מכאן, על ידי הצבה של קל לראות שבנקודה  מתקיים
מתקיים

כמו כן נחשב את  בסביבה של על ידי גזירה רגילה לפי (אבל נשים לב ש הם פונקציות של ):
בסביבה של על ידי גזירה רגילה לפי (אבל נשים לב ש הם פונקציות של ):

נציב  ונקבל:
ונקבל:

שאלה 4
סעיף א
המשוואות המדוברות דיפרנציאביליות ברציפות והגרדיאנט של התנאי הוא:
שהוא לא מתאפס בנקודות שמקיימות את התנאי.
לכן אפשר להשתמש בכופלי לגרנז ללא חשש.
שימוש בכופלי לגרנז מוביל אל המשוואות הבאות:
אם נסתכל על שלושת המשוואות הראשונות, נקבל מערכת משוואות לינארית
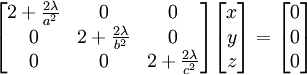
אם המטריצה הפיכה, אז הפתרון היחיד הוא

וזה לא יקיים את האילוץ
לכן בהכרח המטריצה לא הפיכה, כלומר

בגלל ש  מספרים שונים אלה שלוש אפשרויות שונות.
מספרים שונים אלה שלוש אפשרויות שונות.
אם  נקבל שבהכרח
נקבל שבהכרח  ולפי האילוץ
ולפי האילוץ
 כלומר
כלומר  .
.
בדומה שתי האפשרויות האחרות הן:


כעת נותר להחליט אם אלה אקסטרימלים (נקודות קיצון).
אפשר להפעיל שיקול כזה: היות ו רציפה על קבוצה סגורה וחסומה, יש לה נקודות מינמום ומקסימום גלובאליות (שהן בפרט מקומיות).
ידוע שנקודות הקיצון המקומיות הן פתרונות של משוואות לגרנז'.
לכן שניים מהפתרונות חייבים להיות מינימום ומקסימום גלובאליים.
היות ו  ברור ש
ברור ש
 הן מקסימום גלובאלי.
הן מקסימום גלובאלי.
ו  הוא מינימום גלובאלי.
הוא מינימום גלובאלי.
כעת נותר להחליט האם  היא גם נקודת קיצון.
היא גם נקודת קיצון.
אפשר להפעיל שיקול כזה:
אם נסתכל על ההטלה על המישור  נקבל חישוב של
נקבל חישוב של  תחת האילוץ
תחת האילוץ 
במצב כזה,  היא נקודת מינימום.
היא נקודת מינימום.
אם נסתכל על ההטלה למישור  נקבל ש
נקבל ש  היא נקודת מקסימום.
היא נקודת מקסימום.
ולכן היא לא נקודת קיצון.
לסיכום נקודות הקיצון הן:
נקודות מקסימום

נקודות מינימום:

סעיף ב

הגרדיאנט הוא:

אם נשווה אותו ל  ונקבל:
ונקבל:


נקבל שאם או  שתי המשוואות מתקיימות.
שתי המשוואות מתקיימות.
אם  , נקבל שהמשוואות הן:
, נקבל שהמשוואות הן:


הפתרון של המערכת הזאת הוא:

ולכן כלל הנקודות הקריטיות הן:

עכשיו צריך לסווג
מטריצת ההסיאן היא:

כמובן שהצבה של או לא תקדם אותנו יותר מדי.
אם נציב נקבל (אם אין לי טעות חישוב):

המינור הראשון שלילי והמינור השני חיובי, לכן זו מטריצה שלילית (לחלוטין) ולכן זו נקודת מקסימום.
עכשיו צריך למיין ידנית את שאר הנקודות.
נתחיל בנקודות שעל ציר  .
.
נביט על נקודה כלשהיא  .
.
אם נתקדם לאורך הישר  (שעובר כמובן ב ).
(שעובר כמובן ב ).
אז

אם  אז הפונקציה שלנו שלילית כש
אז הפונקציה שלנו שלילית כש  וחיובית כש
וחיובית כש 
אם  אז הפונקציה שלנו חיובית כש ושלילית כש
אז הפונקציה שלנו חיובית כש ושלילית כש
בכל מקרה היא לא תהיה נקודת קיצון.
נותר לבדוק את הנקודה  .
.
אם נתקדם לאורך הישר  נקבל ש
נקבל ש
 ולכן היא מקסימום לאורך הקו הזה.
ולכן היא מקסימום לאורך הקו הזה.
אבל אם נתקדם לאורך הישר  נקבל ש
נקבל ש
 נקבל ש היא נקודת מינימום לאורך הקו הזה.
נקבל ש היא נקודת מינימום לאורך הקו הזה.
לכן היא גם נקודת אוכף.
סיכום ביניים: כל ציר הוא נקודות אוכף.
כעת נעבור לציר .
כלומר נחקור נקודות מהצורה  .
.
אם  אז קיימת סביבה של שבה
אז קיימת סביבה של שבה  ולכן באותה סביבה מתקיים ש
ולכן באותה סביבה מתקיים ש
 ולכן
ולכן  היא נקודת מקסימום.
היא נקודת מקסימום.
אם  אז קיימת סביבה שבה
אז קיימת סביבה שבה  ואז
ואז  ולכן היא מינימום
ולכן היא מינימום
אם אז קיימת סביבה שבה ואז ולכן היא מקסימום.
כבר ראינו שהנקודה היא נקודת אוכף (היא על ציר ).
נותר לבדוק את הנקודה  .
.
נתקדם לאורך הישר  ונקבל
ונקבל  שזאת פונקציה עם נקודת פיתול ב .
שזאת פונקציה עם נקודת פיתול ב .
לכן היא נקודת אוכף.
לסיכום:
נקודות קריטיות:
מתוכן:
מקסימום:

מינימום:

אוכף:

שאלה 5
סעיף א
דרך א' לפתרון:
היות ו  היא פונקציה אי זוגית לפי (או ) והתחום שלנו סימטרי ביחס ל (או ) אז האינטגרל הוא .
היא פונקציה אי זוגית לפי (או ) והתחום שלנו סימטרי ביחס ל (או ) אז האינטגרל הוא .
דרך ב', חישוב:
זה די ברור שצריך להשתמש בקוארדינטות פולריות.
אם מחליפים

אז נקבל שהתחום החדש הוא  ו
ו 
הבעיה היחידה היא זה לא נכון להגיד ש  .
.
זה נכון רק כש 
בתחום  מתקיים דווקא
מתקיים דווקא 
ולכן נעדיף ש  יהיה בתחום
יהיה בתחום ![[-\frac{\pi}{2},\frac{3\pi}{2}]](/images/math/1/6/8/1686615fb75a05db936a11ad0e86f75c.png) ולא
ולא ![[0,2\pi]](/images/math/5/8/c/58c9a5de0cb1a343ae0acd1fb191eea1.png)


סעיף ב
נראה שצריך להשתמש כאן בקוארדינטות כדוריות

והתחום החדש שלנו יהיה

ולכן

